



Sygnały wyjściowe sinus/cosinus serii GE-A Enkoder typu przekładni

Enkoder sygnałów wyjściowych sinus/cosinus serii GE-A
Precyzyjny czujnik prędkości i położenia z wyjściem sinus/cosinus, obsługa funkcji debugowania online
Aplikacja:

Wrzeciono - silnik CNC Pomiar prędkości maszyny Pozycjonowanie
n Wykrywanie pozycji obrotowej i prędkości w maszynach CNC
n Systemy wytwarzania energii i wytwarzania energii
n Urządzenia kolejowe
n Windy
Opis ogólny
Enkodery przekładniowe GE-A to bezkontaktowe enkodery inkrementalne do pomiaru prędkości obrotowej i położenia. Oparte na unikalnej technologii czujników tunelowych magnetooporu (TMR) firmy Gertech, zapewniają one ortogonalne różnicowe sygnały sin/cos o wysokiej jakości, wraz z sygnałem indeksowym i ich sygnałami odwrotnymi. Seria GE-A jest przeznaczona do przekładni 0,3~1,0 modułu o różnej liczbie zębów.
Cechy
Amplituda sygnału wyjściowego w 1Vpp o wysokiej jakości
Wysoka częstotliwość odpowiedzi do 1 MHz
Zakres temperatury pracy od -40°C do 100°C
Stopień ochrony IP68
Zalety
n Całkowicie uszczelniona obudowa z metalową obudową zapewniającą najwyższy poziom ochrony
n Pomiar bezdotykowy, odporny na ścieranie i wibracje, może pracować w trudnych warunkach, takich jak woda, olej lub pył
n Słaba indukcja magnetyczna zapobiega namagnesowaniu przekładni, a powierzchnia enkodera nie jest łatwa do adsorbowania opiłków żelaza
n Duża tolerancja szczeliny powietrznej i pozycji montażowej dzięki czujnikom TMR o wysokiej czułości
n Dopuszczalne są zęby wskazujące zarówno wypukłe, jak i wklęsłe
Parametry elektryczne
| SYMBOL | NAZWA PARAMETRA | WARTOŚĆ | NOTATKA |
| Vcc | Napięcie zasilania | 5 ± 10% V | DC |
| Prostak | Prąd wyjściowy | ≤20mA | Brak obciążenia |
| Vout | Sygnał wyjściowy | sin/cos (1Vpp±10%) |
|
| Płetwa | Częstotliwość wejściowa | ≤1M Hz |
|
| Fout | Częstotliwość wyjściowa | ≤1M Hz |
|
|
| Faza | 90°±5% |
|
|
| Metoda kalibracji | Podręcznik |
|
|
| Rezystancja izolacji | 10MΩ | DC500V |
|
| Wytrzymać napięcie | AC500 V | 1 minuta |
|
| Impuls grupy EMC | 4000 V |
Parametry mechaniczne
| SYMBOL | NAZWA PARAMETRA | WARTOŚĆ | NOTATKA |
| D | Odległość pomiędzy otworami montażowymi | 27 mm | Za pomocą dwóch śrub M4 |
| Luka | Montaż Szczelina powietrzna | 0,2/0,3/0,5 mm | Odpowiadający 0,4/0,5/0,8- odpowiednio moduł |
| Toł | Tolerancja montażu | ±0,05 mm |
|
| To | Temperatura pracy | -40~100°C |
|
| Ts | Temperatura przechowywania | -40~100°C |
|
| P | Stopień ochrony | IP68 | Obudowa ze stopu cynku, całkowicie zalana |
Zalecane parametry przekładni
| SYMBOL | NAZWA PARAMETRA | WARTOŚĆ | NOTATKA |
| M | Moduł przekładni | 0,3 ~ 1,0 mm |
|
| Z | Liczba zębów | bez limitu |
|
| δ | Szerokość | Min. 10 mm | Polecam 12mm |
|
| Tworzywo | stal ferromagnetyczna | Poleć stal 45# |
|
| Indeksuj kształt zęba | ząb wypukły/wklęsły | Polecam ząb wklęsły |
|
| Stosunek szerokości zęba pomiędzy dwiema warstwami | 1:1 | Szerokość zęba wskazującego wynosi 6 mm |
|
| Dokładność przekładni | powyżej poziomu ISO8 | Odpowiadający poziomowi JIS4 |
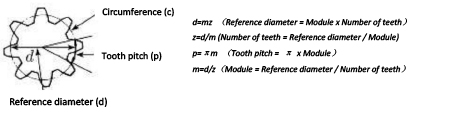
Metoda obliczania parametrów przekładni:
Sygnały wyjściowe
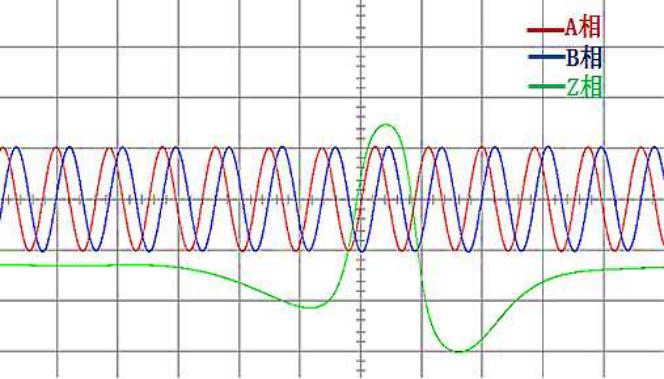
Sygnałami wyjściowymi enkodera są sygnały różnicowe sinus/cosinus o amplitudzie 1 Vpp wraz z sygnałem indeksowym. Dostępnych jest sześć zacisków wyjściowych, w tym A+/A-/B+/B-/Z+/Z-. Sygnały A/B to dwa ortogonalne różnicowe sygnały sinus/cosinus, a sygnał Z to sygnał indeksowy.
Poniższa tabela przedstawia zmierzone sygnały różnicowe XT A/B/Z.
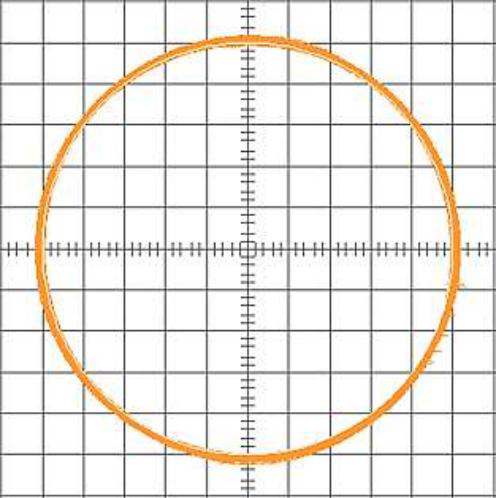
Poniższy wykres przedstawia figurę Lissajous zmierzonych sygnałów XY.
Moduł przekładni
Seria produktów GE-A jest przeznaczona do przekładni o module 0,3~1,0, a liczba zębów może się różnić.
Poniższa tabela przedstawia zalecaną szczelinę powietrzną przy montażu poniżej 0,4/0,5/0,8 modułu.
| Moduł przekładni | Montaż Szczelina powietrzna | Tolerancja montażu |
| 0,4 | 0,2 mm | ±0,05 mm |
| 0,5 | 0,3 mm | ±0,05 mm |
| 0,8 | 0,5 mm | ±0,05 mm |
Liczba zębów
Aby uzyskać optymalne wyniki, enkoder powinien dobierać koła zębate o odpowiedniej liczbie zębów. Zalecany numerzębów wynosi 128, 256 lub 512. Niewielka różnica w liczbie zębów jest akceptowalna i nie wpływa na jakośćsygnały wyjściowe.
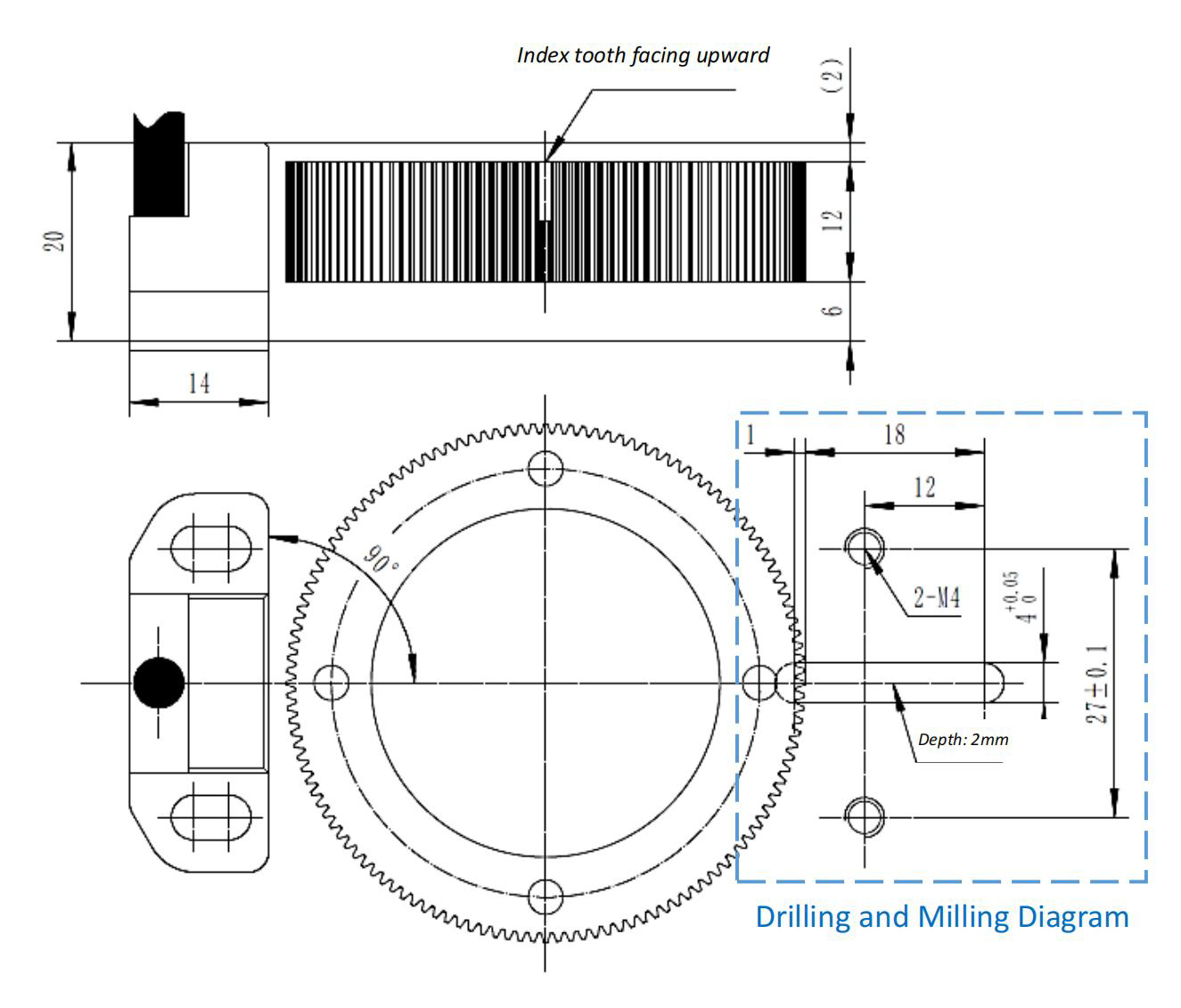
Procedura instalacji
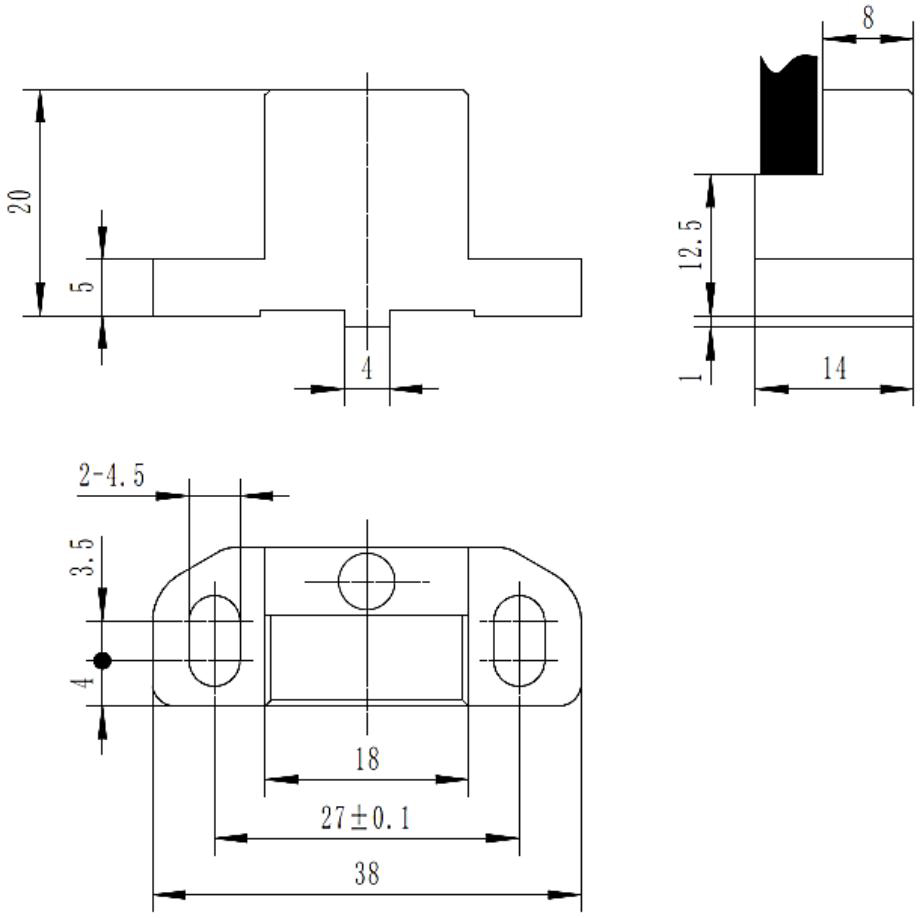
Enkoder charakteryzuje się kompaktową konstrukcją, a odległość między dwoma otworami montażowymi wynosi 27 mmkompatybilny z większością podobnych produktów dostępnych na rynku. Procedura instalacji jest następująca.
1. Zamontuj enkoder za pomocą dwóch śrub M4. Śruby nie powinny być jeszcze mocno dokręcone, aby umożliwić regulacjęszczelinę powietrzną montażową.
2. Włóż szczelinomierz o żądanej grubości na środek enkodera i koła zębatego. Przesuń enkoder w stronęprzekładnię tak, aby pomiędzy enkoderem, szczelinomierzem a kołem zębatym nie było już wolnego miejsca i można było wyjąć czujnikpłynnie, bez użycia dodatkowej siły.
3. Mocno dokręć dwie śruby M4 i wyciągnij szczelinomierz.
Dzięki wbudowanej możliwości samokalibracji enkodera, będzie on wytwarzał pożądany sygnał wyjściowy, o ilemontażową szczelinę powietrzną zapewnia powyższa procedura w granicach tolerancji.
Kabel
Kabel enkodera w wersji normalnej składa się z ośmiu ekranowanych przewodów typu skrętka. Przekrój kablardzeń wynosi 0,14 mm2, a średnica zewnętrzna 5,0 ± 0,2 mm. Domyślna długość kabla wynosi 1 m, 3 m, 5 m.Kabel enkodera w wersji ulepszonej składa się z dziesięciu ekranowanych przewodów typu skrętka. Przekrój kablardzeń wynosi 0,14 mm2, a średnica zewnętrzna 5,0 ± 0,2 mm. Domyślna długość kabla wynosi 1 m, 3 m, 5 m.
Wymiary
Pozycja montażowa
Kod zamówienia

1: Enkoder typu przekładni
2 (moduł przekładni):04:Moduł 0:4 Moduł 05:0:5 moduł 0X: 0:X;
3(A: Typ sygnałów Sin/Cos): A: Sygnały Sin/Cos;
4(interpolacja):1 (domyślnie);
5 (kształt indeksu):F: ząb wklęsły M: ząb wypukły;
6 (liczba zębów):128.256.512,XXX;
7 (długość kabla):1 m (standard), 3 m, 5 m;
8 (debugowanie online):1: wsparcie, 0: nie obsługuje;
Informacje zawarte w niniejszym dokumencie uważa się za dokładne i wiarygodne. Publikacja nie przekazuje ani nie implikuje żadnej licencji wynikającej z patentu lub innych praw własności przemysłowej lub intelektualnej. Gertech zastrzega sobie prawo do wprowadzania zmian w specyfikacjach produktów w celu poprawy jakości, niezawodności i funkcjonalności produktu. Gertech nie ponosi żadnej odpowiedzialności wynikającej z zastosowania i użytkowania swoich produktów. Klienci Gertecg używający lub sprzedający ten produkt do użytku w urządzeniach, urządzeniach lub systemach, w przypadku których można zasadnie oczekiwać, że nieprawidłowe działanie spowoduje obrażenia ciała, robią to na własne ryzyko i zgadzają się w pełni zabezpieczyć Gertech przed wszelkimi szkodami wynikającymi z takich zastosowań.
-
Seria GI-D200 Zakres pomiaru 0-15000/20000mm...
-

Cena hurtowa 2019 Pulsoksymetr palcowy
-

Enkoder z wałem drążonym o wysokiej reputacji Trd-RV, Tr...
-
Tani cennik dla enkodera drutowego z Cano...
-
Profesjonalny drut do drutu o szerokim zakresie w Chinach Miran...
-
Najwyższej jakości enkoder ciągnący z Modbus Abso...




